

The Resurgence of Direct Human Subsea Exploration: Beyond ROVs and the Legacy of Deep Rover
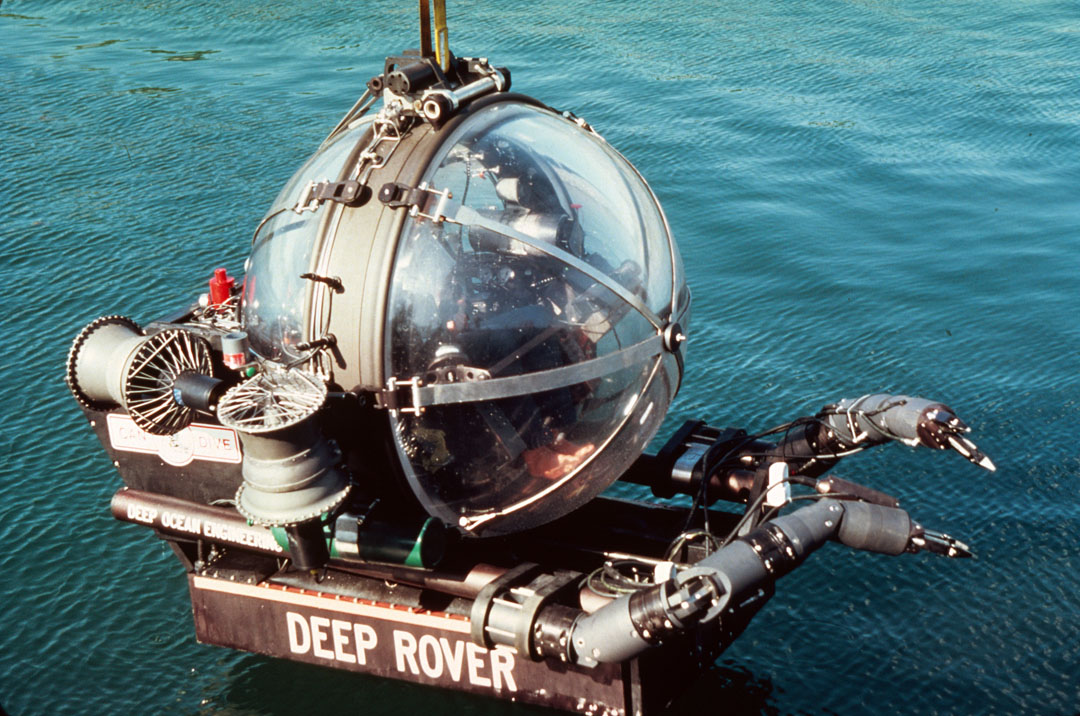
In late March 2026, renewed interest surrounds the concept of piloted submersibles for deep-sea exploration, sparked by the enduring legacy of vehicles like the Deep Rover, originally constructed in 1984. This Canadian-engineered submersible, notable for its acrylic sphere offering panoramic views, represents a pivotal moment in underwater technology, shifting focus from tethered, prone-position observation to comfortable, direct human interaction with the abyssal environment. While remotely operated vehicles (ROVs) now dominate deep-sea work, the desire for firsthand exploration persists, driving innovation in submersible design and safety.
From Oil Rigs to Oceanographic Breakthroughs: Deep Rover’s Multifaceted Career
The initial impetus behind Deep Rover wasn’t purely scientific curiosity. Funding originated from Newfoundland and Labrador’s provincial government, alongside Petro-Canada and Husky Oil, intending to bolster offshore oil exploration. The 1980s oil price collapse, however, forced a pivot towards research. This adaptability proved crucial. The submersible’s dives in locations like Monterey Bay, California, and Crater Lake, Oregon, yielded significant discoveries. In Monterey Bay, it facilitated the filming of previously undocumented deep-sea life, contributing to the establishment of the Monterey Bay Aquarium Research Institute (MBARI). At Crater Lake, it confirmed the existence of geothermal vents and bacterial mats, leading to environmental protections.
The Trade-offs of Piloted vs. Unpiloted Subsea Systems
The shift towards ROVs and autonomous underwater vehicles (AUVs) isn’t simply a matter of cost. While human-piloted submersibles offer unparalleled situational awareness and dexterity – crucial for tasks requiring nuanced manipulation – they are inherently limited in depth and duration by life support constraints. Modern ROVs, leveraging advancements in fiber optic communication and high-resolution sonar, can operate at depths exceeding 6,000 meters for extended periods. The challenge lies in replicating the human experience remotely. The development of haptic feedback systems for ROV manipulators is a key area of ongoing research, attempting to bridge this gap.
Technical Deep Dive: Deep Rover’s Architecture and Limitations
Deep Rover’s design prioritized pilot comfort and visibility. The 13-centimeter-thick acrylic sphere, while providing a near-360-degree view, presented significant engineering challenges. Acrylic, while transparent and relatively lightweight, has a lower compressive strength than materials like titanium or steel. The sphere’s structural integrity relied on a carefully calculated balance between thickness, radius, and internal pressure regulation. Power was supplied by two deep-cycle lead-acid battery pods, each weighing approximately 170 kilograms, offering a 4-6 hour operational window at depths up to 1,000 meters. Navigation relied on a gyro compass, sonar, and both digital and analog depth gauges. The four thrusters – two fixed aft and two rotating – provided maneuverability, controlled via microswitches integrated into the armrests.
However, the system wasn’t without limitations. The lead-acid batteries, while reliable, were bulky and offered relatively low energy density compared to modern lithium-ion alternatives. The through-water communication system, while functional, suffered from bandwidth limitations and susceptibility to interference. The reliance on manual controls for manipulator arms, while providing precision, demanded significant pilot skill and training.
The Manipulator Challenge: Dexterity in Extreme Environments
Sylvia Earle’s initial complaint about the “stupid” arms on the atmospheric diving suit, Jim, highlighted a critical challenge in underwater robotics: achieving dexterity under extreme pressure differentials. Graham Hawkes’s subsequent design for Deep Rover’s manipulators, boasting four degrees of freedom and sensory feedback, was a breakthrough. The ability to “feel” the force, motion, and texture of objects underwater was paramount. This was achieved through a combination of force sensors integrated into the manipulator joints and a sophisticated control system that translated these signals into tactile feedback for the pilot.
Today, advancements in soft robotics are offering new solutions to the manipulator challenge. Soft robotic arms, constructed from flexible materials like silicone and elastomers, are inherently more compliant and less prone to damage in confined spaces. They as well offer improved dexterity and the ability to grasp objects of varying shapes and sizes.
Ecosystem Bridging: The Rise of Commercial Submersibles and the Data Security Imperative
The legacy of Deep Rover is visible in the burgeoning commercial submersible market. Companies like Triton Submarines are building increasingly sophisticated submersibles for both private and research use. These vehicles often incorporate advanced features like acrylic pressure hulls, panoramic views, and sophisticated life support systems. However, this growth also introduces new security concerns.
“As submersibles become more connected – integrating advanced sensors, communication systems, and even AI-powered navigation – they become increasingly vulnerable to cyberattacks. Protecting the integrity of navigation data, sensor readings, and communication channels is paramount, not only for the safety of the crew but also for the protection of sensitive marine data.” – Dr. Anya Sharma, CTO, Blue Horizon Security, a maritime cybersecurity firm.
The potential for malicious actors to compromise a submersible’s systems – disrupting navigation, manipulating sensor data, or even gaining control of the vehicle – is a serious threat. Implementing robust cybersecurity measures, including finish-to-end encryption for communication channels, intrusion detection systems, and regular security audits, is essential. The use of secure boot processes and hardware-based security modules can further mitigate the risk of compromise. NIST Cybersecurity Framework provides a valuable blueprint for securing these complex systems.
The Data Deluge: Managing and Securing Subsea Sensor Data
Modern submersibles generate vast amounts of data – high-resolution sonar imagery, video footage, sensor readings, and environmental data. Managing and securing this data is a significant challenge. Cloud-based data storage and processing solutions offer scalability and accessibility, but also introduce new security risks. Employing data encryption, access control mechanisms, and data loss prevention (DLP) technologies is crucial. Ensuring the provenance and integrity of the data is essential for scientific validity. IEEE is actively developing standards for data management and security in underwater environments.
Looking Ahead: The Future of Human-Piloted Subsea Exploration
While ROVs and AUVs will continue to play a vital role in deep-sea exploration, the allure of direct human observation remains strong. The development of new materials, advanced life support systems, and improved cybersecurity measures will pave the way for a new generation of human-piloted submersibles. These vehicles will not only enable scientists to conduct groundbreaking research but also offer a unique and immersive experience for explorers and adventurers. The lessons learned from Deep Rover – the importance of pilot comfort, panoramic visibility, and dexterous manipulation – will continue to shape the future of subsea exploration. Woods Hole Oceanographic Institution remains a key driver of innovation in this field, pushing the boundaries of underwater technology.