
Curiosity’s Wheels are Failing: A Deep Dive into Martian Rover Engineering and NASA’s Adaptive Strategies
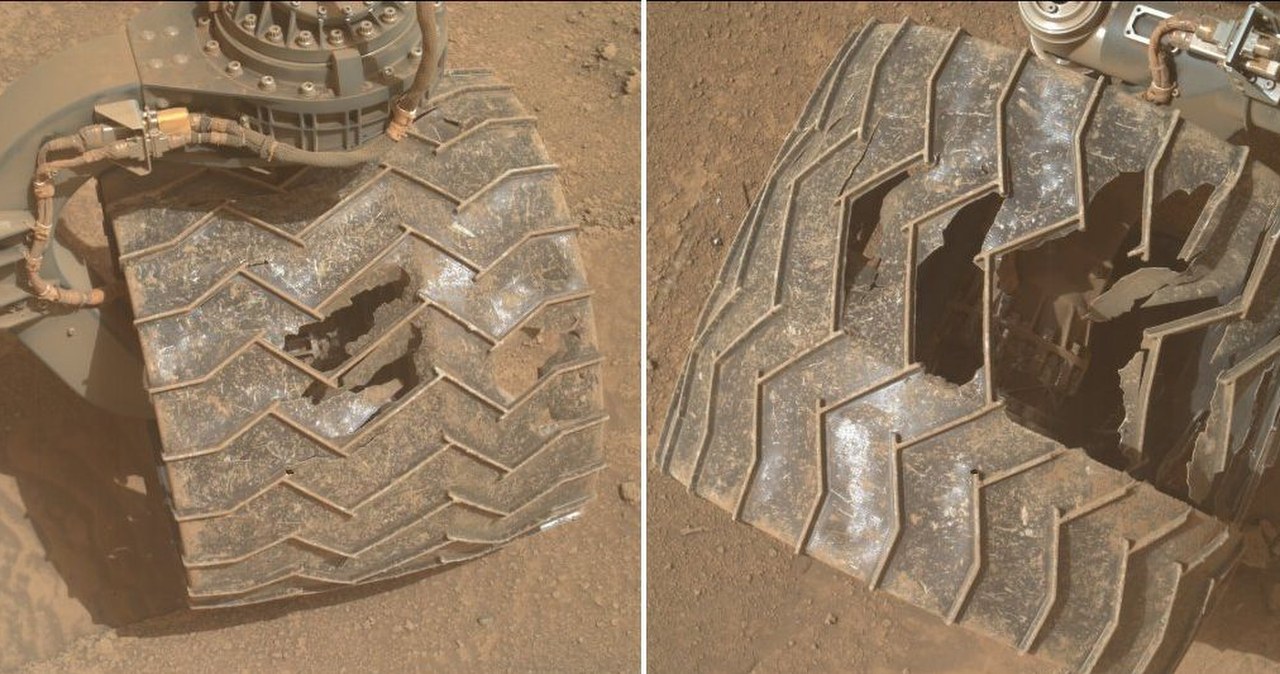
NASA’s Curiosity rover, exploring Gale Crater on Mars since 2012, is exhibiting significant wheel damage. Recent images transmitted back to Earth reveal substantial wear, with the mid-right wheel showing exposed internal components. While not immediately mission-ending, this degradation necessitates a nuanced understanding of the rover’s engineering, NASA’s mitigation strategies and the broader implications for future extraterrestrial exploration. This isn’t simply a matter of flat tires; it’s a testament to the brutal realities of operating complex robotics in an unforgiving environment.
The Root of the Problem: Martian Terrain and Wheel Design
The initial signs of wheel wear appeared as early as 2013, but the current state is demonstrably worse. The original wheel design, constructed from aluminum, was optimized for testing on Earth-based simulations. Though, the actual Martian terrain – a mix of sharp rocks, abrasive dust, and unexpectedly hard surfaces – proved far more damaging than anticipated. The wheels aren’t pneumatic (filled with air); instead, they’re a mesh design intended to provide traction and conform to uneven surfaces. This design, while effective in many scenarios, lacks the resilience needed to withstand prolonged exposure to the abrasive Martian regolith. The problem isn’t uniform wear; certain areas, particularly the grousers (the chevron-shaped treads), are experiencing accelerated degradation. This uneven wear impacts the rover’s ability to maintain consistent traction and navigate challenging terrain.
The choice of aluminum, while offering a favorable strength-to-weight ratio crucial for a rover powered by a Radioisotope Thermoelectric Generator (RTG), presents inherent limitations in terms of abrasion resistance. Titanium alloys were considered, but the added weight would have significantly reduced the rover’s operational range and scientific payload capacity. It’s a classic engineering trade-off, and one NASA is now actively managing.
Software Solutions: Algorithmic Traction Control and Route Optimization
NASA hasn’t simply accepted the wheel damage as inevitable. In 2017, a significant software update introduced a new traction control algorithm. This system, operating in real-time, dynamically adjusts the speed of each wheel based on data from the rover’s suspension system and onboard sensors. It identifies points of contact, assesses the terrain’s resistance, and optimizes wheel speeds to minimize slippage and reduce stress on vulnerable areas. Think of it as a highly sophisticated anti-lock braking system, but for a six-wheeled robot traversing an alien landscape. The algorithm leverages a Kalman filter to predict wheel slippage and proactively adjust motor torque.
Complementing the software updates is a strategic shift in route planning. Initially, Curiosity traversed relatively flat, hard-packed surfaces. However, recognizing the accelerated wear, NASA redirected the rover towards softer, more yielding terrain on Mount Sharp – specifically, areas composed of sedimentary rock and shale. This change significantly slowed the rate of wheel degradation, demonstrating the effectiveness of adaptive mission planning. It’s a prime example of closed-loop control, where real-world data informs and modifies operational parameters.
The “Scarecrow” Project and Contingency Planning: Mechanical Intervention on Mars
Recognizing the potential for catastrophic wheel failure, NASA proactively developed a contingency plan centered around a terrestrial test rover nicknamed “Scarecrow.” This duplicate Curiosity was subjected to simulated damage scenarios, specifically focused on assessing the rover’s ability to continue operating with partially or completely broken wheels. The results were surprisingly encouraging. Scarecrow demonstrated that Curiosity could continue to traverse Martian terrain even with significant wheel damage, provided the broken fragments could be safely managed.
This led to the development of innovative techniques for detaching damaged wheel sections *in situ* – on Mars. These methods, playfully dubbed “Twist and Shout Maneuver” and “Pigeon Toe Maneuver,” involve strategically maneuvering the rover to employ natural obstacles (rocks and terrain features) to break off damaged portions of the wheel. The “Twist and Shout” maneuver utilizes a rocking motion to induce stress fractures, while the “Pigeon Toe” maneuver involves carefully positioning the rover to wedge a damaged section against a rock and then driving forward to shear it off. These aren’t elegant solutions, but they represent a pragmatic approach to extending the rover’s lifespan.
The Broader Implications: Lessons for Future Missions and Robotic Resilience
The ongoing saga of Curiosity’s wheels provides invaluable lessons for the design and operation of future Martian rovers, and for all extraterrestrial robotic missions. The Perseverance rover, currently exploring Jezero Crater, incorporates several design improvements aimed at enhancing wheel durability. These include larger diameter wheels, a more robust tread pattern, and a revised suspension system designed to distribute weight more evenly.
“The Curiosity experience has fundamentally altered our approach to rover wheel design. We’re now prioritizing abrasion resistance and incorporating more sophisticated materials and structural designs. It’s not just about making the wheels stronger; it’s about understanding the complex interplay between terrain, wheel geometry, and operational parameters.” – Dr. Ashwin Vasavada, Perseverance Project Scientist, NASA (as stated in a 2024 interview with Space.com)
However, the challenges extend beyond hardware. The development of more advanced autonomous navigation algorithms, capable of identifying and avoiding hazardous terrain, is crucial. The integration of machine learning techniques to predict wheel wear and optimize route planning in real-time will be essential for maximizing the lifespan of future rovers. NASA’s Curiosity mission page provides detailed updates on the rover’s status and ongoing research.
What This Means for the Future of Space Robotics
The Curiosity mission, despite its wheel woes, continues to deliver groundbreaking scientific discoveries. Its ongoing exploration of Gale Crater is providing unprecedented insights into the history of Mars and its potential for past habitability. The rover’s resilience, coupled with NASA’s innovative mitigation strategies, is a testament to the ingenuity of the engineers and scientists involved.
The situation also highlights the importance of redundancy and adaptability in space robotics. Future missions will likely incorporate modular designs, allowing for easier repair and replacement of damaged components. The development of in-situ resource utilization (ISRU) technologies, enabling the creation of replacement parts using Martian materials, could further enhance mission resilience. IEEE Robotics and Automation Letters frequently publishes research on advancements in space robotics and ISRU.
The wheel damage on Curiosity isn’t a sign of failure; it’s a valuable learning experience. It’s a reminder that space exploration is inherently risky and that overcoming challenges requires creativity, perseverance, and a willingness to adapt. The data gathered from Curiosity’s ongoing struggles will undoubtedly shape the design and operation of future missions, paving the way for even more ambitious explorations of the Red Planet and beyond. The Planetary Society offers a wealth of information on space exploration and advocacy.