

Hyper-Redundancy: EPFL’s Mori3 Robot Redefines Resilience Through Shared Resources
Researchers at EPFL’s Reconfigurable Robotics Laboratory have unveiled a novel approach to robotic resilience, demonstrating that sharing all critical resources – power, communication, and sensing – across modular components can dramatically reduce the likelihood of system failure, even in the face of individual module incapacitation. This breakthrough, detailed in Science Robotics, challenges conventional wisdom that increasing robotic complexity inherently increases vulnerability, and opens pathways for highly adaptive and reliable robotic systems. The team’s Mori3 robot successfully navigated complex terrain despite a deliberately disabled central module, showcasing the power of ‘hyper-redundancy’.
The Reliability-Adaptability Paradox, Solved?
The core problem in multi-agent robotics isn’t simply the increased number of potential failure points, but the cascading effect of those failures. Traditional modular robots often attempt to mitigate this with backups or self-reconfiguration. However, these solutions are frequently complex, energy-intensive, and don’t guarantee full functionality restoration. EPFL’s approach is elegantly simple: eliminate single points of failure by making every resource available to every module. This isn’t merely about redundancy; it’s about creating a system where the loss of one component is absorbed by the collective.
The inspiration, as the researchers note, comes from biological systems. Consider a tree’s root network or the interconnected neurons in a brain. Damage to one part doesn’t necessarily cripple the whole. This principle of distributed resilience is now being applied to robotics, and the implications are significant. The key finding is that sharing *all* resources is crucial. Sharing only one or two doesn’t reverse the trend of increasing failure rates with more modules; it requires a complete, interconnected resource pool.
Under the Hood: Architectural Details and Performance Implications
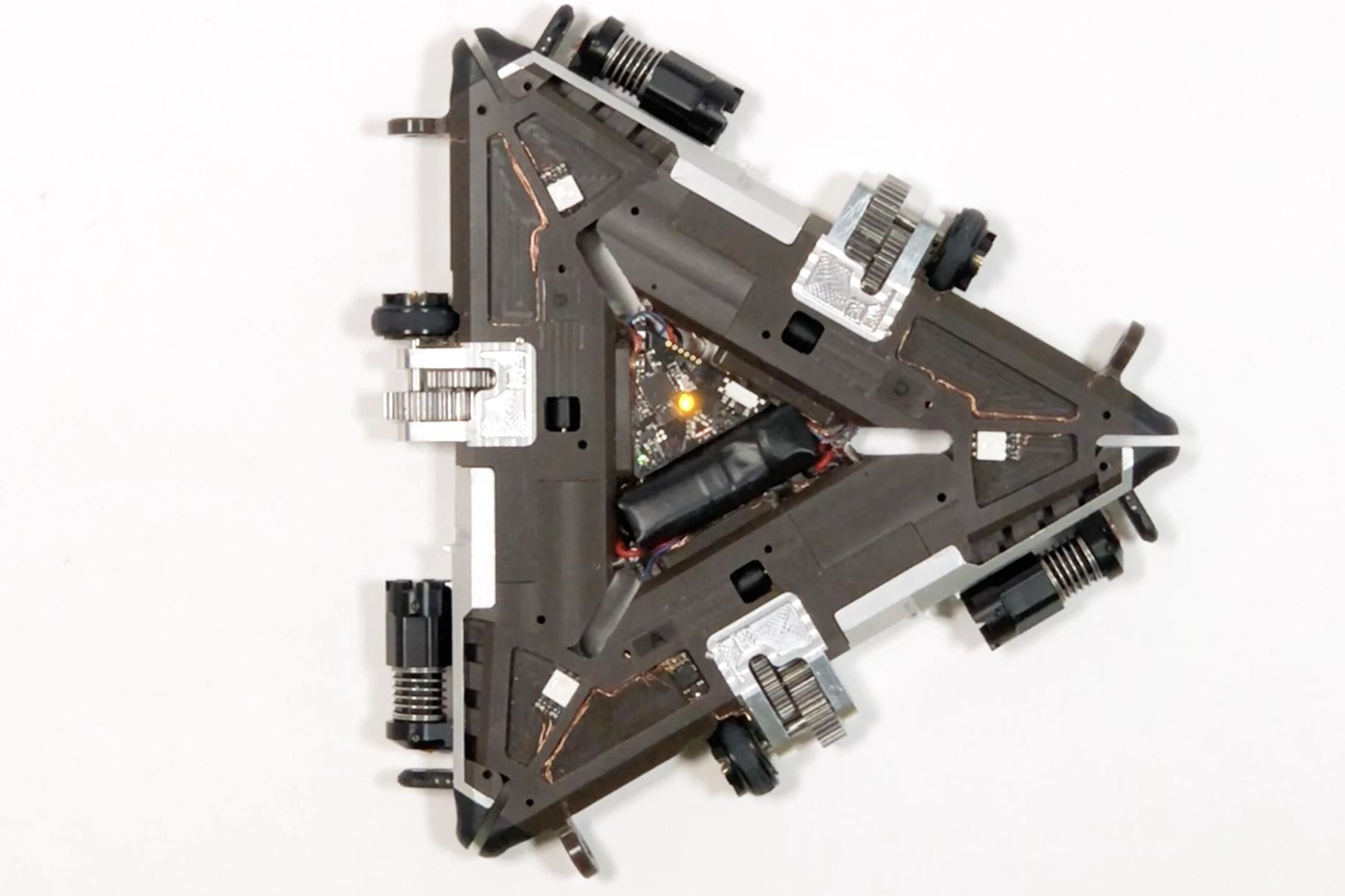
The Mori3 robot, used in the study, is a particularly apt platform for demonstrating this concept. Its origami-inspired design, composed of four triangular modules connected by hinges, allows for a high degree of reconfigurability. However, the real innovation lies in the internal architecture. Each module isn’t reliant on its own dedicated power supply, communication link, or sensor suite. Instead, these resources are distributed across the entire system, accessible to any module as needed. This is achieved through a sophisticated power distribution network and a mesh communication topology. The communication relies on a custom protocol built on top of the IEEE 802.15.4 standard, optimized for low-latency, high-reliability data transfer within the robot’s structure.
The team’s experiments involved systematically disabling different resources in the central module of the Mori3. Crucially, the neighboring modules didn’t simply attempt to compensate; they *fully* absorbed the lost functionality. This wasn’t a graceful degradation of performance; it was a seamless continuation of operation. The system’s ability to ‘revive’ a dead module is a remarkable feat, and it highlights the potential for creating robots that can operate with unprecedented reliability.
What Which means for Enterprise IT
The implications extend far beyond academic robotics. Consider industrial automation, where downtime can be incredibly costly. A fleet of robots operating in a factory, built on this hyper-redundancy principle, could continue functioning even if individual units experience failures. This dramatically reduces the need for preventative maintenance and minimizes disruptions to production. The architecture also lends itself well to distributed control systems, where individual modules can operate autonomously while still contributing to the overall system goal.
Bridging the Ecosystem: Open Source and the Future of Robotic Resilience
While the EPFL team hasn’t released the full Mori3 hardware designs as open source, they have published the core algorithms and control software on GitHub. This is a crucial step towards fostering wider adoption and collaboration. The software is written primarily in Python, leveraging the ROS 2 (Robot Operating System) framework. The choice of ROS 2 is significant, as it provides a standardized platform for robotic software development and facilitates interoperability with other robotic systems.

However, the long-term success of this approach hinges on the development of standardized hardware interfaces for resource sharing. Currently, each robotic platform requires custom engineering to implement hyper-redundancy. A standardized power distribution bus, communication protocol, and sensor interface would dramatically lower the barrier to entry and accelerate innovation. This is where the open-source community can play a vital role.
“The biggest challenge now is standardization. We need to move beyond bespoke solutions and create a common framework for resource sharing in robotics. This will require collaboration between researchers, manufacturers, and standards organizations.” – Dr. Henrik Christensen, Professor of Robotics at UC San Diego, in a private communication.
The 30-Second Verdict
EPFL’s function represents a paradigm shift in robotic design. Hyper-redundancy isn’t just about making robots more reliable; it’s about fundamentally changing how we think about failure in complex systems. This technology has the potential to revolutionize industries ranging from manufacturing to healthcare, and it’s a testament to the power of bio-inspired engineering.
The Chip Wars and the Rise of Distributed Computing
This research also subtly intersects with the ongoing “chip wars” and the broader trend towards distributed computing. The reliance on shared resources, while increasing resilience, also demands more sophisticated power management and communication protocols. This, in turn, drives demand for specialized hardware – specifically, NPUs (Neural Processing Units) capable of handling the complex calculations required for real-time resource allocation and fault tolerance. Companies like NVIDIA and AMD are heavily invested in NPU development, and their technologies will likely play a crucial role in enabling the next generation of hyper-redundant robots. The ability to perform edge computing – processing data locally on the robot – is also essential, reducing reliance on external communication links and further enhancing resilience.
the distributed nature of this architecture aligns with the growing trend towards federated learning, where robots can learn from each other without sharing raw data. This has significant implications for data privacy and security, particularly in sensitive applications like healthcare and defense.
The team’s next steps involve scaling up the system to include a larger number of modules and exploring the application of this framework to robotic swarms. The potential for creating self-healing, self-organizing robotic systems is now within reach, and EPFL’s research is paving the way for a future where robots are not just intelligent, but also remarkably resilient.
The original research paper can be found at: Science Robotics. Further information on the Mori3 robot is available at: Paik Lab Website. Details on the Reconfigurable Robotics Laboratory can be found at: EPFL RRL.