
{kind=link}
Researchers have achieved a breakthrough in microrobotics, demonstrating a novel method for steering microscopic swimming robots through complex mazes using principles inspired by Albert Einstein’s theory of relativity. This innovative approach, which creates what scientists are calling “artificial spacetime,” bypasses the demand for bulky onboard sensors and electronics, opening doors for applications ranging from targeted drug delivery to precision micro-manufacturing.
The core challenge in developing microrobots – machines measured in microns, roughly the width of a human hair – lies in their limited capacity for complex navigation systems. Traditional methods require miniaturized sensors and computing power, which quickly grow impractical at such a tiny scale. To overcome this hurdle, a team at the University of Pennsylvania devised a system that leverages the physics of light and gravity to guide these tiny machines. The research, published in npj Robotics in November 2025, presents a compelling solution to this longstanding problem.
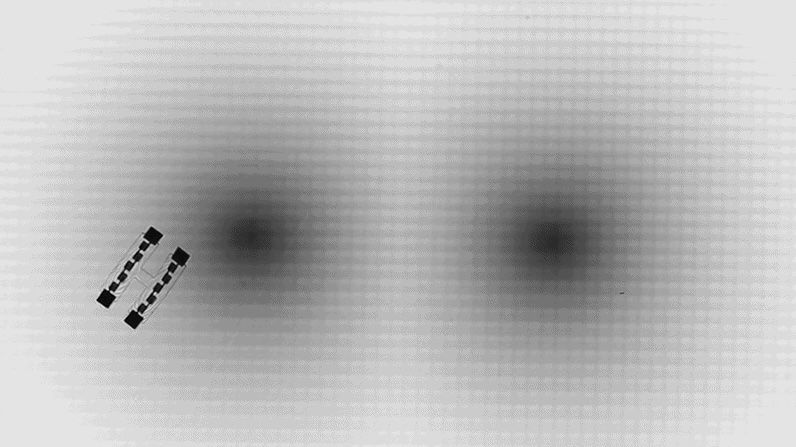
The team’s approach centers around electrokinetic (EK) robots, submerged in an ionized solution. These robots, measuring approximately 100 microns, are equipped with tiny solar cells and electrodes. When exposed to light, the solar cells power the electrodes, generating an electric field that propels the robots through the liquid. The key innovation lies in how this movement is controlled. Rather than directly controlling the robots, researchers created a patterned light field that mimics the curvature of spacetime as described by general relativity.
According to Einstein’s theory, gravity bends spacetime around massive objects, influencing the paths of light and other objects. Objects follow the shortest paths – geodesics – which appear curved from our perspective. The researchers modeled a maze as a curved virtual space, transforming the paths to the target into straight lines within this model. This model was then converted into a two-dimensional light map, where darker areas attract the robots and brighter areas repel them, effectively creating a “faux black hole” at the maze’s endpoint. As Science.org reports, the robots naturally follow these geodesics, navigating the maze without needing complex programming.
“We showed that the way EK robots behave in patterned light fields is identical to the paths light follows in general relativity,” explained Marc Miskin, an assistant professor of electrical and systems engineering at the University of Pennsylvania, in an email to Live Science. “Amazingly, you can use the robots as a gravity analog since the correspondence is exact. Alternatively, you can turn general relativity ideas around to use them to guide robots: in the same way gravity pulls objects together, you can guide robots to a specific spot.”
Artificial Spacetime: A New Control Method
This “artificial spacetime” approach, as the researchers call it, offers a minimalist and decentralized control method, particularly well-suited for resource-limited machines like microrobots. The team’s work builds on previous observations that the trajectories of these robots are mathematically equivalent to the path of light in general relativity, as detailed in research published in npj Robotics. By adopting techniques from relativity and optics, they were able to construct and analyze control fields with unprecedented efficiency.
Potential Applications and Future Directions
While the current study focused on navigating a simple maze, the implications of this technology are far-reaching. Miskin envisions a range of potential applications within the next decade, including medical diagnostics and micro-assembly. “Some use cases we’re interested in exploring include checking up on teeth following a root canal, a kind of dental biopsy to make sure everything was cleared, eliminating tumors after making local measurements to confirm cells are cancerous, or even, outside of bio, assembly of microchips with tiny robotic helpers,” Miskin stated. The ability to precisely control these microscopic robots could revolutionize fields requiring access to confined or delicate environments.
The researchers emphasize that this work represents a bridge between physics and technology, rather than a competition. The well-understood principles of relativity and optics provide a robust framework for controlling these robots, while the experiments themselves offer new insights into the behavior of light in simplified spacetime scenarios. As Miskin notes, “The microworld is a fascinating place; I wouldn’t be surprised if these ideas are just the tip of the iceberg.”
This innovative approach to microrobotics promises to unlock new possibilities for manipulating matter at the smallest scales, paving the way for advancements in medicine, manufacturing, and beyond. Further research will focus on refining the control mechanisms and exploring the limits of this “artificial spacetime” technology.
What are your thoughts on the potential of microscopic robots? Share your comments below, and let’s discuss the future of this exciting field!