
Researchers have unveiled a multi-legged, multi-eyed autonomous robot that mimics biological locomotion patterns to traverse complex, irregular terrain. The machine, which utilizes a high-density sensor array for environmental mapping, represents a shift toward bio-inspired robotics, focusing on modular actuator control rather than traditional wheel-based or bipedal navigation systems.
Mechanical Complexity and the Multi-Legged Paradigm
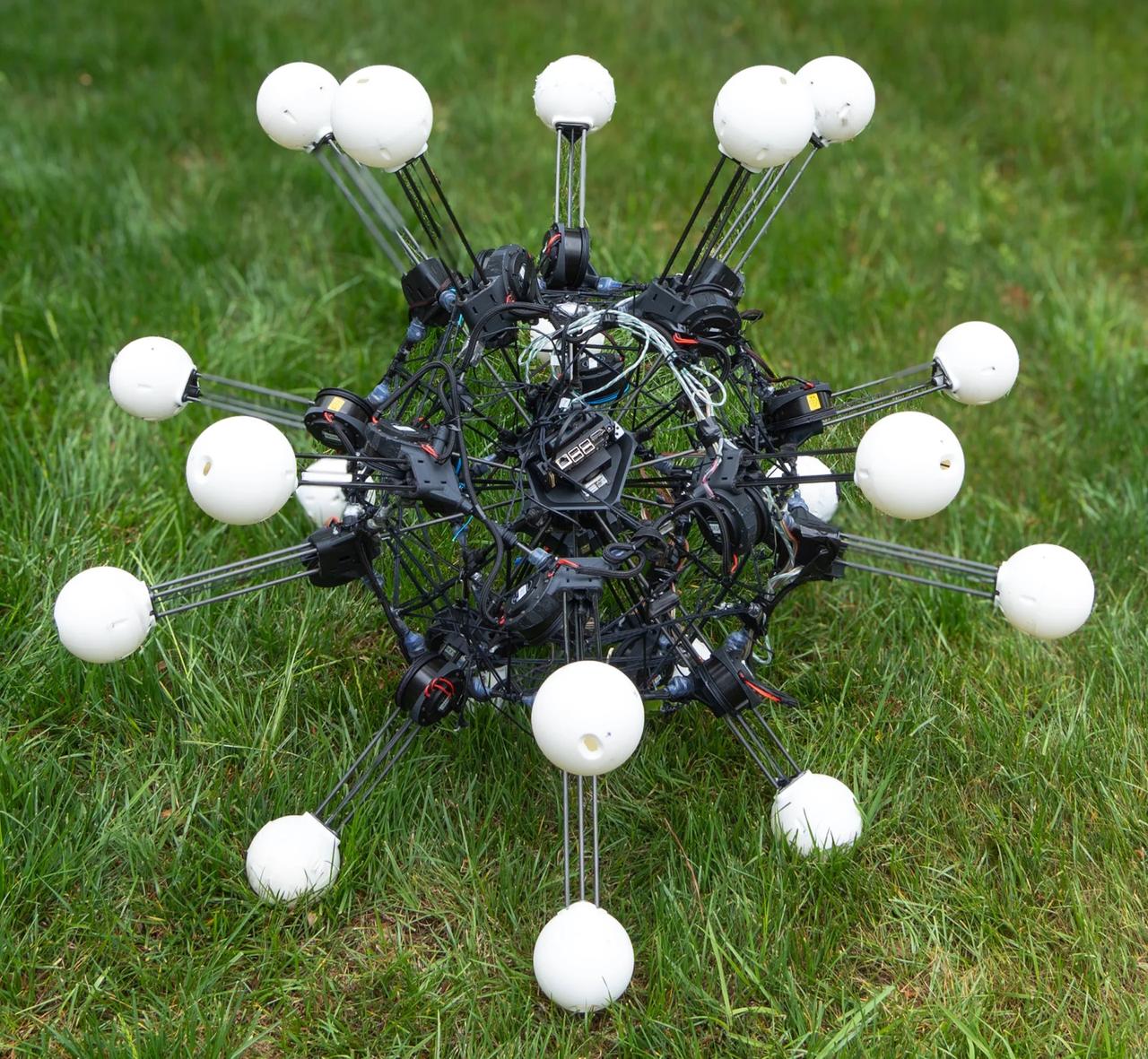
The robot’s design, characterized by its high count of limbs and optical sensors, prioritizes stability over raw speed. By distributing weight across 20 points of contact, the system minimizes ground pressure, a critical factor for navigating unstable surfaces such as loose sediment or industrial debris. This approach contrasts sharply with the standard quadrupedal architecture popularized by commercial platforms like Boston Dynamics’ Spot.

The “eyes”—a distributed array of visual sensors—provide a 360-degree field of view, feeding into an onboard processing unit that performs real-time simultaneous localization and mapping (SLAM). Unlike systems relying on high-latency cloud computing, this robot handles pathfinding locally. This edge-computing requirement is essential for operations in environments where wireless signal integrity is compromised or entirely absent.
Architecture and Control Logic
At the core of the machine’s mobility is a distributed control system. Managing 20 distinct actuators requires a sophisticated gait-generation algorithm capable of preventing limb interference. According to recent advancements in soft and legged robotics, the primary challenge in such high-degree-of-freedom (DoF) systems is not the hardware, but the synchronization of the inverse kinematics.

The robot utilizes a decentralized control loop where local limb controllers manage reflex-like reactions to obstacles, while a central high-level controller manages the global trajectory. This mimics the biological “central pattern generator” found in insects, allowing the machine to maintain balance even if individual limbs suffer mechanical failure.
“The transition from centralized to decentralized control in multi-legged robotics is the only way to achieve true robustness in unstructured environments. When you scale past six legs, the computational overhead for a single master CPU becomes a bottleneck. Distributed logic is the future of resilient field robotics.”
— Dr. Aris Thorne, Lead Robotics Engineer at the Autonomous Systems Institute.
Comparative Analysis of Locomotion Efficiency
To understand why researchers are moving toward high-leg-count designs, it is necessary to compare the mechanics of different locomotion strategies. The table below highlights the trade-offs between traditional and bio-inspired designs.
| Architecture | Terrain Versatility | Energy Efficiency | Control Complexity |
|---|---|---|---|
| Wheeled | Low | High | Low |
| Quadruped | Medium | Medium | High |
| Multi-Legged (20+) | Very High | Low | Very High |
Bridging the Ecosystem: From Lab to Industrial Application
The development of this robot is not merely an academic exercise; it signals a shift in the Robot Operating System (ROS) ecosystem toward handling increasingly complex, non-standard kinematic chains. As developers push for greater autonomy in “dirty, dull, and dangerous” tasks, the industry is moving away from the rigid, pre-programmed movements of the 2010s.
However, the shift toward higher limb counts introduces significant maintenance overhead. Each additional actuator is a potential point of failure, requiring sophisticated predictive maintenance software to track torque degradation and thermal throttling. For enterprise users, the “break-even” point for such a robot depends on whether the increased mobility justifies the higher maintenance costs associated with servicing a 20-limb drivetrain.
The 30-Second Verdict
- Mobility: Superior on uneven terrain compared to tracked or wheeled systems.
- Control: Relies on decentralized local controllers to manage high-degree-of-freedom complexity.
- Trade-offs: Lower energy efficiency and higher mechanical maintenance requirements than simpler designs.
- Market Outlook: Likely to see deployment in specialized inspection roles where high-stability, non-destructive navigation is paramount.
The integration of high-density visual arrays and decentralized motor control places this machine at the intersection of biological mimicry and modern industrial automation. While it may not replace the efficiency of traditional robotics in controlled warehouse settings, its ability to navigate “alien” terrain makes it a potent tool for field research, search-and-rescue, and infrastructure inspection in hazardous zones.
As of mid-2026, the primary hurdle remains the transition from prototype to mass-producible unit. Scaling the manufacturing process for a 20-legged robot—specifically regarding the cost of high-torque, low-weight actuators—will dictate whether this technology stays in the laboratory or enters the commercial supply chain.